Settori > Automotive
1992–1999: SISTEMA DI CONTROLLO INTEGRATO DRIVE BY COMPUTER E ADAPTIVE CRUISE CONTROL
EICAS ha cooperato per molto tempo con il Centro Ricerche FIAT (CRF). Nel periodo 1992-1997 EICAS ha sviluppato algoritmi innovativi per il controllo longitudinale e laterale del veicolo, per il controllo del rollio e delle sospensioni, per il rilevamento dei guasti e il ripristino delle performance del sistema.
Nel 1999, sempre per CRF, EICAS ha sviluppato gli algoritmi di controllo per il sistema Adaptive Cruise Control (ACC) congiuntamente agli algoritmi per l'elaborazione dei dati radar.
EICAS possiede strumenti software proprietari per la simulazione della dinamica del veicolo, per la simulazione di guasti, per il controllo automatico del veicolo e per testare la tolleranza ai guasti.
2000–2005: DA SISTEMI DI SICUREZZA PASSIVA AD ATTIVA
Dal 2000 al 2003 EICAS è stata partner del progetto europeo IST CHAMELEON (Pre-crash Application All Around The Vehicle). Il progetto aveva l'obiettivo di sviluppare un sistema di sensori per la previsione delle collisioni dei veicoli, in modo da attivare in tempo utile i sistemi di sicurezza passiva (pre-tensionamento delle cinture, airbag). Durante il progetto, EICAS ha sviluppato un algoritmo proprietario di previsione della collisione che è stato testato con pieno successo con prove nel Centro Sicurezza del CRF e in ambito urbano e extraurbano usando un'auto Alfa147 equipaggiata con uno scanlaser e con sensori della dinamica del veicolo (misura della velocità longitudinale e della velocità di imbardata).
EICAS ha esteso la ricerca di cui sopra all'area della sicurezza attiva, sviluppando un nuovo algoritmo per evitare/mitigare la collisione integrando l'algoritmo di previsione della collisione sviluppato in CHAMELEON con un algoritmo atto alla sicurezza attiva. Lo scopo è quello di evitare o almeno mitigare la collisione tramite un'azione diretta sui 4 freni indipendenti dell'auto, da effettuarsi quando la collisione viene predetta come inevitabile. Nel 2005 l'algoritmo è stato provato in un ambiente simulato nell'ambito del progetto EICASDRIVE (DOCUP) con risultati molto promettenti. Esso è stato quindi proposto per la sperimentazione nell'ambito del progetto italiano MECCANO (2010-2015).
2006–2015: SISTEMI DI CONTROLLO POWER TRAIN PER VEICOLI IBRIDI
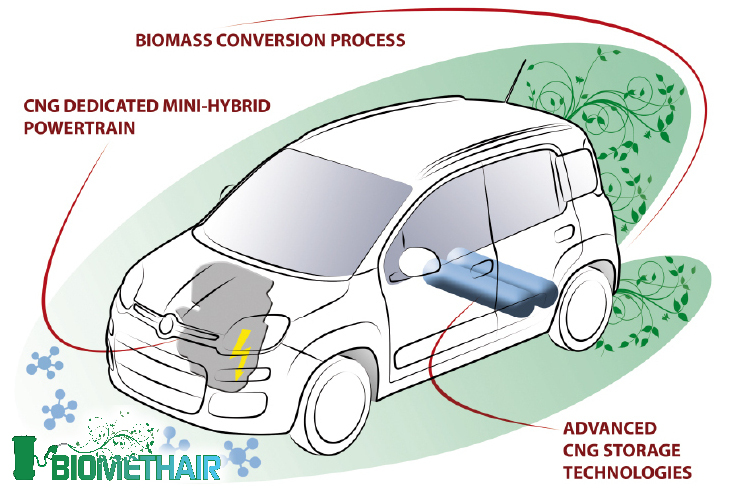
Dal 2006 EICAS ha lavorato al progetto di sistemi di controllo Power Train per veicoli ibridi, con lo scopo di raggiungere un compromesso tra prestazioni, facilità di guida e risparmio di energia. Le principali esperienze sono state effettuate nell'ambito del progetto europeo HI-CEPS (Highly Integrated Combustion Electric Propulsion System, 2006-2009) e dei progetti regionali PIE-VERDE (Piattaforma Ibridi Elettrici E Reti di Distribuzione Ecosostenibile, 2013-2015) e BIOMETHAIR (2013-2015).
2011–PRESENTE: LOCALIZZAZIONE PRECISA PER VEICOLI PIÙ SICURI E AUTONOMI

Un'integrazione di EICASDRIVE con le misure EGNOS-GALILEO e i dati contenuti nelle mappe digitali è stata sviluppata all'interno del progetto europeo GSA ERSEC (Enhanced Road Safety by integrating Egnos-Galileo data with on-board Control system, EICAS project leader), concluso con pieno successo nell'Ottobre 2011.
Nell'ambito del progetto, è stata concepita la ERSEC Key Enabling Technology, in grado di attuare una localizzazione molto accurata del veicolo tramite strumentazione di basso costo!
Nell'ambito del progetto italiano MECCANO (Mobilità urbana Eco-compatibile attraverso un Commuter Configurabile, A uso esclusivo/NOn esclusivo) – coordinato da CRF e finanziato all'interno del programma INDUSTRIA 2015 – avente lo scopo di sviluppare la nuova urban concept car, EICAS ha realizzato una integrazione di ERSEC con le tecnologie V2X (Vehicle-To-Vehicle e Vehicle-To-Infrastructure). Il sistema sviluppato da EICAS è stato sperimentato con pieno successo su un auto FIAT.
Al momento EICAS è partner del progetto italiano MIE (Mobilità Intelligente Ecosotenibile), con il compito di sviluppare e sperimentare un sistema di guida autonoma e di anticollisione innovativo, da sperimentare su un veicolo Daily di IVECO.